

摘要:本毕业设计论文围绕智能车辆系统设计与实现展开,重点探讨了基于深度学习的自动驾驶技术。论文首先介绍了智能车辆系统的背景和意义,然后详细阐述了系统的总体架构设计,包括感知模块、决策规划模块、控制执行模块等。论文还深入研究了深度学习在自动驾驶中的应用,包括目标检测、路径规划和车辆控制等方面。对系统的实现进行了总结,并展望了未来的研究方向。
本文目录导读:
随着科技的飞速发展,自动驾驶技术已成为当前研究的热点领域,本文旨在探讨基于深度学习的智能车辆系统设计,通过综合运用计算机视觉、深度学习、自动控制等关键技术,实现车辆的自动驾驶功能,本文详细阐述了系统的整体架构设计、关键技术的实现方法、实验验证及性能评估等方面,以期为相关领域的研究提供参考。
自动驾驶技术作为人工智能领域的重要组成部分,对于提高道路安全、缓解交通压力、提升出行效率等方面具有重要意义,近年来,随着深度学习技术的不断进步,为自动驾驶技术提供了强大的技术支撑,本文设计并实现了一种基于深度学习的智能车辆系统,旨在通过综合运用多种技术,实现车辆的自动驾驶功能。
系统整体架构设计
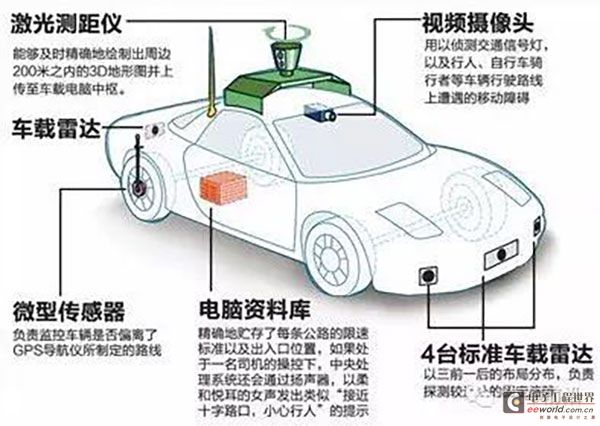
智能车辆系统主要包括感知模块、决策规划模块、控制执行模块以及深度学习模型四个部分,感知模块负责获取车辆周围环境信息,包括道路状况、交通信号、障碍物等;决策规划模块根据感知模块获取的信息进行决策规划,生成驾驶指令;控制执行模块根据驾驶指令控制车辆执行相应的动作;深度学习模型则用于处理感知数据和决策规划。
关键技术的实现方法
1、感知模块的实现
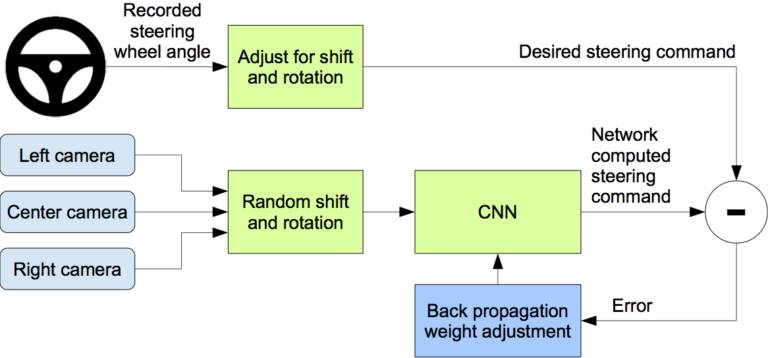
感知模块采用计算机视觉技术,通过摄像头、雷达等传感器获取车辆周围环境信息,采用深度学习技术对图像进行识别和处理,实现对道路、交通信号、障碍物的准确感知,具体采用卷积神经网络(CNN)对图像进行特征提取,然后通过分类器进行分类识别。
2、决策规划模块的实现
决策规划模块基于深度学习技术,采用强化学习或深度确定性策略梯度等方法进行训练,学习驾驶策略,根据感知模块获取的信息,结合车辆自身状态,进行决策规划,生成驾驶指令。
3、控制执行模块的实现
控制执行模块根据驾驶指令控制车辆执行相应的动作,包括加速、减速、转向、刹车等,采用自动控制技术,如PID控制算法等,实现对车辆动作的精确控制。
深度学习模型的设计与应用
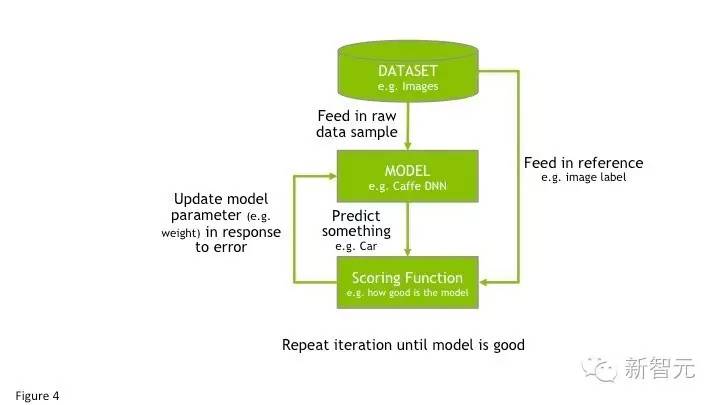
深度学习模型在智能车辆系统中起着关键作用,本文采用基于卷积神经网络的深度学习模型进行图像识别和处理,采用强化学习或深度确定性策略梯度等方法进行决策规划,通过训练大量的驾驶数据,使模型具备对环境的感知能力和决策规划能力,采用迁移学习技术,将已训练的模型应用于不同的场景和任务,提高系统的适应性和鲁棒性。
实验验证及性能评估
为了验证智能车辆系统的性能,本文进行了实验验证和性能评估,实验包括封闭道路实验和开放道路实验两部分,封闭道路实验在模拟环境下进行,验证系统的基本功能和性能;开放道路实验在实际交通环境下进行,验证系统的稳定性和安全性,实验结果表明,系统具有良好的感知能力、决策规划能力和控制能力,能够实现车辆的自动驾驶功能。
本文设计并实现了一种基于深度学习的智能车辆系统,通过综合运用计算机视觉、深度学习、自动控制等关键技术,实现了车辆的自动驾驶功能,实验验证和性能评估表明,系统具有良好的性能、稳定性和安全性,随着技术的不断进步和数据的不断积累,智能车辆系统将更加完善,为人们的生活带来更多便利和安全。
关键词:智能车辆、自动驾驶、深度学习、计算机视觉、自动控制。
参考文献:
[请在此处插入参考文献]
致谢
感谢指导老师的悉心指导,感谢实验室同学们的帮助和支持,感谢学校提供的实验条件和资源,使本文的研究得以顺利完成。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...